Operating System 1
운영체제 1일차
- System Call 보다 API의 사용이 권장되는 이유
- Compatibility Linux 뿐만아니라 FreeBSD에서 동작하도록 하기 위해서 운영체제에 따라 달라지는 시스템콜보다 POSIX API의 사용
| Application | Application | |
|---|---|---|
| POSIX | POSIX | |
| LINUX | FreeBSD |
윈도우 같은 경우에는 Win32 API에서 프로그래밍을 해야한다
cygwin - Win32 위에 올라가며, 윈도우에서 POSIX 코드를 수행할 수 있게 해준다 그러나 통과해야하는 계층이 늘어나 속도가 느리다
- Information Hiding process file, message queue 등 OS의 내부적인 구조를 알고 있지 않은 상태에서 앱개발
우리는 System Call에 대해 알아본다
System call : open() - user mode -> kernel model -> os kernel 내 구현된 커널 코드 실행
printf(""); 는 POSIX API 에 정의된 함수이며 실행되기 위해 write(fd,..) System Call 을 호출한다.
System Call은 자신만의 번호를 갖는다
/* This file contains the system call number */
#define __NR_restart_syscall 0
#define __NR_exit 1
#define __NR_fork 2
#define __NR_read 3
#define __NR_write 4
#define __NR_open 5
...
컴퓨터가 부팅되면 System Call Table이 메모리 상에 만들어진다
Entry(sys_call_table)
.long sys_restart_syscall
.long sys_exit
.long sys_fork
.long sys_read
.long sys_write
.long sys_open
각각의 system call entry는 해당 system call 동작이 정의된 코드를 가르킨다.
함수 포인터가 코드를 포인트 하고 있다.
int read(int fd, void* pbuf, int nBytes);
#define __NR_read 3 __syscall3(int, __NR_read, int, fd, void*, pBuf, int, nBytes)
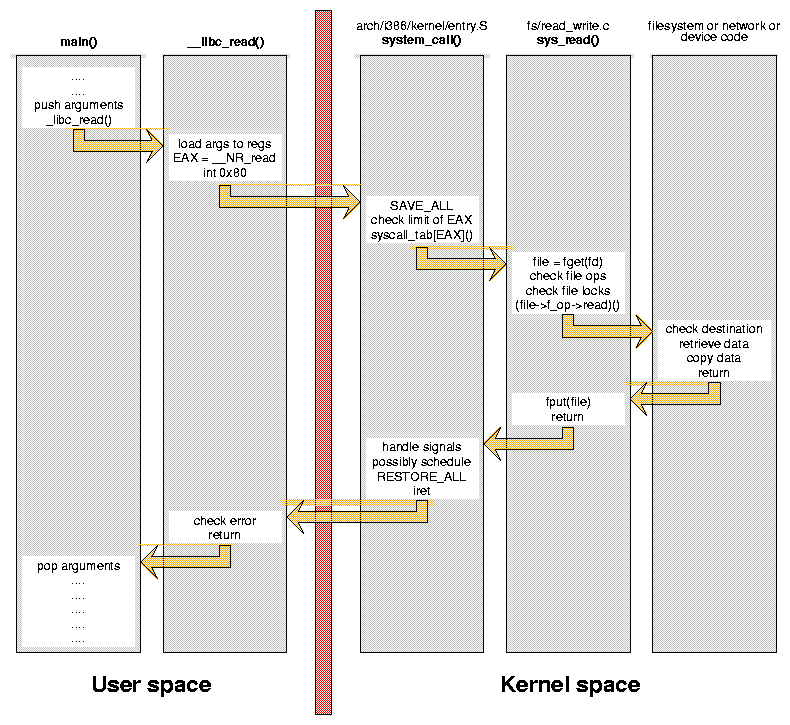
- user mode
- read 함수 호출
- EAX register에 system call 번호 저장
- interrupt 0x80 명령어로 exception 발생
- kernel mode
- EAX가 syscall table의 배열에 있는 인덱스로 사용됨 (sys_read 호출)
- sys_read 실행
- 다시 usermod로 복귀
- interrupt 0x80
- 프로그램에 오류가 발생한 경우 (메모리 참조 오류 등)
- user mode에서 kernel mode로 변환하기 위해 TRAP 호출
- 변수들을 커널 모드 시스템 함수에 전달하는 방법
- CPU Register -> 레지스터 수가 적어서 다른 방법 필요
- CPU Register에 변수들이 담긴 블록 위치를 전달
- 스택에 블록이 저장된다
코드 부분에서는 def로 시작하는 문장과 class로 시작하는 문장만 사용하면 될 거 같기도하고..;;
그러면 markdown에서는 ##로 시작하는 부분만 추출?
”””## >””” 등으로 시작하는 것만 추출
2일차
- 시스템 프로그램이란?
개발자가 프로그램을 개발하고 실행하는데 사용하는 환경으로, 다음 동작들을 지원한다.
파일 변경
상태 정보
프로그래밍 언어 지원 컴파일러, 어셈블러, 디버거, 인터프리터
프로그램 로드 및 실행 프로그램 링크
통신
monolithic architecture -> MS-DOS
접근하면 안될 정보들을 잘못하여 접근하게 되면 서버가 다운될 수 있다.

Layered Approach
Layer N -> Layer N-1 -> … -> layer 1 -> layer 0 의 순서로 진행된다.
Layer N이 유저 인터페이스이고, Layer 0이 하드웨어를 뜻한다.
up call 은 불가능하며 down call 만 가능하다
장점 - 만들고 디버깅하는데 편리하다
각각의 프로그래머가 각각의 계층만 프로그래밍하면 된다.
아래 계층이 제공하는 환경을 바로 위 계층에서 사용한다.
단점
- 계층들에 각각의 역할들을 분리하여 나누어주는 것이 어렵다
계층이 많아질 수록 CPU 부하가 증가한다
- 계층이 추가된는 경우 위에 계층의 코드들을 수정해주어야 하기 때문에 안정성에 문제 발생
Microkernel structure
- prcess management
- memory management
- synchronization
- IPC
외의 memory server, process server, display server, network server, file server 등을 user mode에서 관리

조금 더 쉽게 기능들을 추가할 수 있다.
Modules
module + layered approach
- device driver 필요할 때마다 OS에 device driver가 동적으로 등록된다.
굳이 사용할 필요 없는 device driver을 추가할 필요 없다
- Solaris Modular approach

예로, NTFS가 기본적으로 탑재되어 있는 상태에서 EXT3가 필요할 때 동적으로 파일 시스템을 추가해 줄 수 있다.
Virtual Machine
os와 하드웨어를 새로운 하드웨어처럼 보여지게하는 방법
- vmware
하나의 하드웨어 위에 OS가 배치된다. 가장적인 CPU, 메모리, 디바이스 위에 guest OS가 탑재된다
- java virtual machine

class loader : .class 파일들을 로드 java interpreter : Java Bytecode를 CPU 명령어로 바꾸어 준다
코드를 개발하기는 쉽지만, 속도에 문제가 생기게된다.
System Booting 과정
one-step
- Bootstrap program (BIOS)
- DRAM과 기타 디바이스들에 문제가 있는지 검사
- 디스크에 있는 kernel을 메모리 상에 로드 한다
two-step booting process
- Master Boot Record (boot block) 를 메모리 상에 로드
다양한 OS 선택이 가능
- boot block
- LILO (LInux LOader)
- master boot record에서 선택된 OS의 커널 이미지를 실행시킨다.
- LILO (LInux LOader)
